Improving Accuracy using the YOLO Algorithm
- Now, we have fixed the problem with computational inefficiency
- We still have one problem with our method of object detection
- Specifically, the position of the bounding boxes aren't accurate
- In other words, the position of the bounding boxes are shifted somewhat randomly
- And, the most ideal bounding boxes don't always follow a perfectly squared shape
- We can fix this using the yolo algorithm
Describing the YOLO Algorithm
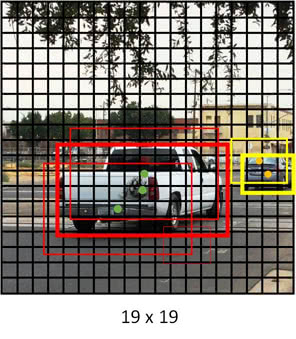
- The concept of breaking down the images to grid cells is unique in YOLO
- Let's say we have grid
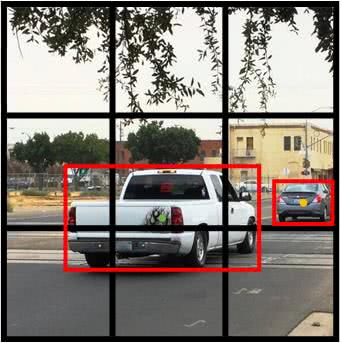
- In the image above we have two cars
- We marked their bounding boxes in red
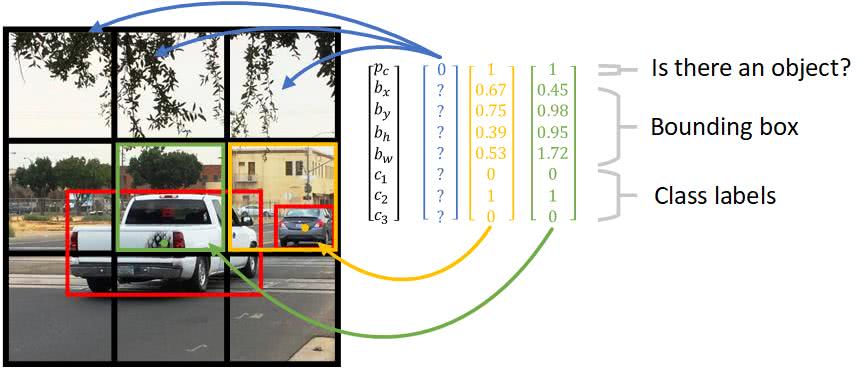
- For each grid cell, we have the following labels for training:
- This is similar to our activations from our convolutional implementation of the sliding window
- Now, we need to associate objects to individual cells
- The rightmost car seems to be obviously associated with the middle-right cell
- The truck seems to be less obviously associated with the center cell
- This is because the yolo algorithm associates an object to a cell based on the object's midpoint
Defining the YOLO Algorithm
- Notice for cells without objects detected
- We use because we don't care about its remaining values
-
The definition of the bounding box parameters are defined as:
- The x coordinate corresponding to the center of the bounding box
- The y coordinate corresponding to the center of the bounding box
- The height of the bounding box
- The width of the bounding box
- The class (e.g. pedestrian, car, etc.)
- The probability of whether there is an object or not
- The yolo loss function is defined as the following:
Intuition behind YOLO Loss Function
- The first term penalizes bad localizations of the center of cells
- The second term penalizes the bounding box with inaccurate height and widths
- The square root is present so that errors in small bounding boxes are more penalizing than erros in big bounding boxes
- The third term tries to make the confidence score equal to the intersection over union between the object and the prediction when there is one object
- The fourth term tries to make the confidence score close to when there aren't any objects in the cell
- The fifth term is a simple classification loss function
Motivating Nonmax Suppression
- There is still a limitation with our yolo algorithm
- Typically, there are many possible bounding boxes for the yolo algorithm to output
- Specifically, how can we evaluate which bounding box is the best?
- To solve this problem, we'll introduce the concept of nonmax suppression
Introducing Intersection over Union
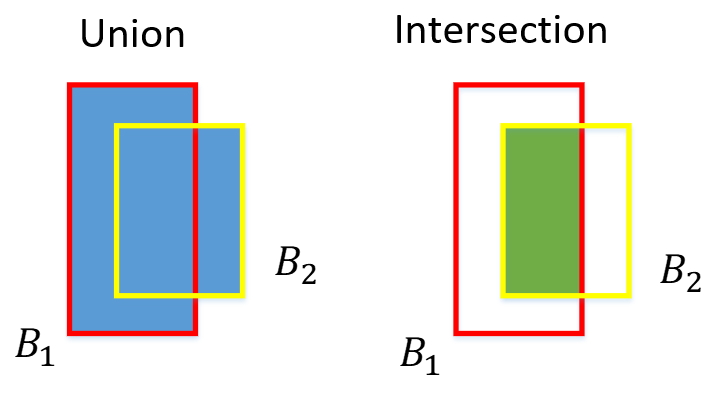
- Before we go into the nonmax suppression concept, we should first introduce the intersection over union (IoU) function
- The iou function is used for evaluating our object detection algorithm
- Specifically, the iou function computes the area of the intersection of two bounding boxes
-
The iou function is used for the following:
- Measuring the similarity of two bounding boxes
-
Training a bounding box against
- The coordinates of the true bounding box are found manually
- In other words, we need to be given the coordinates
- An iou threshold of is considered correct
- In other words, a bounding box with a iou value is considered similar enough to the true bounding box
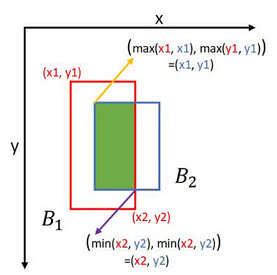
- The iou function doesn't define a bounding box by its center point, width, and height
- Instead, it defines a bounding box based on its upper left corners and lower right corners
- Specifically, we use the iou function when assigning anchor boxes
- We also use the iou function when assigning anchor boxes
-
The algorithm is defined as the following:
- Finding the two corners of the intersection
- Compute the area of the intersection
def iou(box1, box2):
xi1 = max(box1[0], box2[0])
yi1 = max(box1[1], box2[1])
xi2 = min(box1[2], box2[2])
yi2 = min(box1[3], box2[3])
inter_area = (xi2 - xi1) * (yi2 - yi1)
box1_area = (box1[2] - box1[0]) * (box1[3] - box1[1])
box2_area = (box2[2] - box2[0]) * (box2[3] - box2[1])
union_area = box1_area + box2_area - inter_area
iou = inter_area / union_area
return iouIntroducing Nonmax Suppression
- Previously, we used a grid to find our bounding boxes
- Realistically, we'll want to use larger grids
- We use larger grids to achieve more accurate bounding boxes
- For example, a grid could be used instead of a grid
- However, we're more likely to pick up multiple bounding boxes for the same object
- This is because we're running a localization on each grid
- Therefore, other grids will think there is a car as well
-
Our goal is to do the following:
- Keep the bounding boxes that have the highest
- Remove the bounding boxes that are very similar to the bounding boxes with the highest
-
Therefore, we perform nonmax suppression:
- Discard all bounding boxes with
- Choose the bounding box with the largest value
-
Discard any remaining boxes with an iou value
- This is because we want to remove the other similar bounding boxes that aren t the bounding box with the largest
- If we removed boxes with an iou value , then we'd remove other bounding boxes belonging to other objects
Motivating the Anchor Box
- There is still a limitation with our yolo algorithm
- Let's say we have multiple objects in the same grid cell
- For example, suppose we have a pedestrain and a car in a cell
- Then, do we classify the object as a pedestrian or car?
- To solve this problem, we'll introduce the concept of anchor box
Introducing the Anchor Box
- Anchor boxes allow the yolo algorithm to detect multiple objects centered in one grid cell
- We do this by assigning an additional dimension to the output labels
- This dimension refers to the number of anchor boxes per grid cell
- Meaning, we create another hyperparameter representing the pre-defined number of anchor boxes per cell
- Now, we'll be able to assign one object to each anchor box
Describing Anchor Boxes
- Notice, a car and pedestrian are both centered in the middle cell
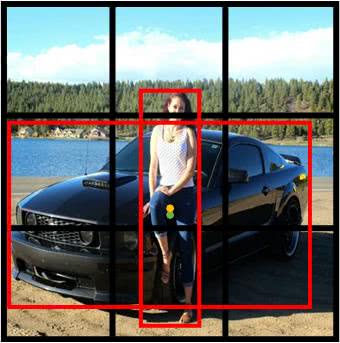
- We should set the number of anchor boxes to be
- Now, each grid cell can detect a pedestrian and a car
- Specifically, a pedestrian and a car in the same cell will be individually assigned to their own anchor box
- This depends on which object and anchor box provide the highest iou value
- Each anchor box specializes in a certain shape
- For example, one anchor box may learn a skinny object, whereas another anchor box may learn a wide object
- In our case, one anchor box could learn a tall, skinny object associated with pedestrians
- And, another anchor box could learn a short, wide object associated with cars
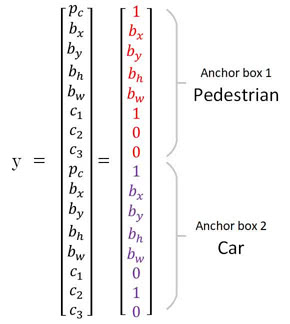
- Our new label will look like the following:
Defining the YOLO Algorithm with Anchor Boxes
-
Suppose we are detecting objects:
- Pedestrian
- Car
- Motorcycle
- Let's also say we're using anchor boxes per cell
- Lastly, let's say our grid is
-
Our labels can be represented as a matrix:
- due to the grid size
- due to the number of anchors
- due to the number of parameters per cell
- Specifically, our label can be represented as a vector
- Our label looks like the following for a single cell:
- Here refers to of anchor box
- And refers to of anchor box
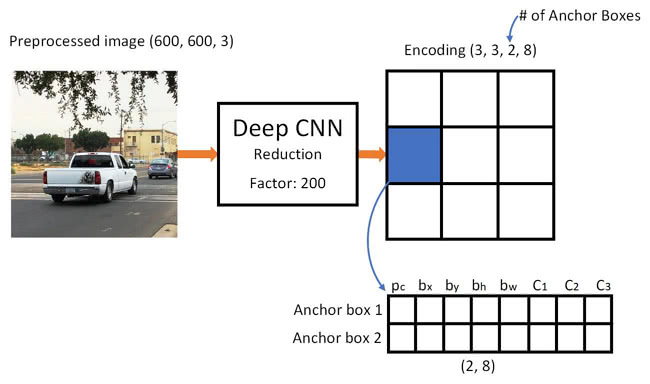
- Essentially, the yolo algorithm will generate an output matrix of shape given an image
- Meaning, each of the grid cells will output two predictions
- We can observe the dimensions of our labels during the training of a single cell in the image below:
Implementing the YOLO Algorithm with Anchor Boxes
- Let's say we want to train a on the image above
- Specifically, we want to train a convolutional network on the image
-
The network will output:
- A classification of the object
- A bounding box around the detected object
- An example output of the middle grid cell is the following:

- The output volume represents a collection of vectors associated with one of the grid cells
- We also need to include nonmax suppresion
- In other words, we'll filter out any improbable bounding boxes
- And, we'll also keep the most probable bounding box associated with an object
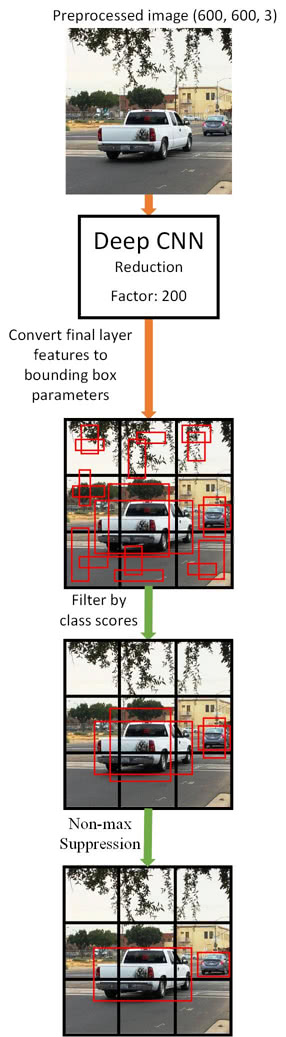
- The following image illustrates the generalized steps for predicting objects and their bounding boxes:
tldr
- The yolo algorithm improves the accuracy of our object detection algorithm
-
Specifically, the yolo algorithm is used for accounting for bounding boxes that:
- May not make up an entire sliding window region
- May not fall perfectly in an individual grid cell
- In other words, the position of the bounding boxes are shifted somewhat randomly
- The yolo algorithm involves breaking down an image into grid cells
-
The definition of the bounding box parameters are defined as:
- The x coordinate corresponding to the center of the bounding box
- The y coordinate corresponding to the center of the bounding box
- The height of the bounding box
- The width of the bounding box
- The class (e.g. pedestrian, car, etc.)
- The probability of whether there is an object or not
- The iou function is used for evaluating estimated bounding boxes against the actual bounding boxes
- In other words, the iou function measures the similarity between two bounding boxes
- Nonmax suppression is used for filtering out any bounding boxes that aren't the most probable associated with an object
-
Nonmax suppression is defined as the following:
- Discard all bounding boxes with
- Choose the bounding box with the largest value
- Discard any remaining boxes with an iou value
- Anchor boxes allow the yolo algorithm to detect multiple objects centered in one grid cell
- We do this by assigning an additional dimension to the output labels
- This dimension refers to the number of anchor boxes per grid cell
- Meaning, we create another hyperparameter representing the pre-defined number of anchor boxes per cell
References
Previous
Next